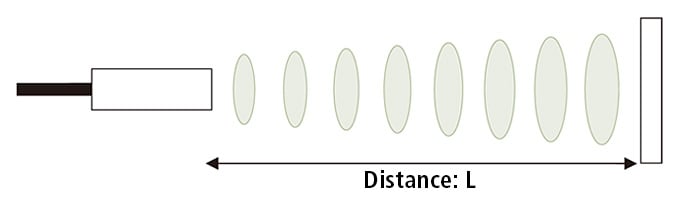
The distance can be calculated with the following formula:
Distance L = 1/2 × T × C
where L is the distance, T is the time between the emission and reception, and C is the sonic speed. (The value is multiplied by 1/2 because T is the time for go-and-return distance.
Features
The following list shows typical characteristics enabled by the detection system.
[Transparent object detectable]
Since ultrasonic waves can reflect off a glass or liquid surface and return to the sensor head, even transparent targets can be detected.
[Resistant to mist and dirt]
Detection is not affected by accumulation of dust or dirt.
[Complex shaped objects detectable]
Presence detection is stable even for targets such as mesh trays or springs.


 Focus on us
Focus on us